Magna tal-Lustrar Robotika – Irfinar tal-Wiċċ Awtomatizzat ta' Preċiżjoni Għolja





Dijagramma dettaljata
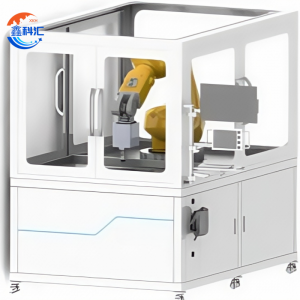

Ħarsa ġenerali lejn il-Magna tal-Lustrar Robotika
Il-Magna tal-Lustrar Robotika hija sistema avvanzata u kompletament awtomatizzata għall-ipproċessar tal-wiċċ, iddisinjata biex tissodisfa l-ogħla rekwiżiti fil-manifattura ta' preċiżjoni. Din tgħaqqad kontroll robotiku ta' sitt assi, teknoloġija tal-lustrar b'feedback tal-forza, u konfigurazzjoni b'ras doppja biex timmaniġġja firxa wiesgħa ta' materjali u ġeometriji kumplessi b'eżattezza u konsistenza eċċezzjonali.
Kemm jekk għal lentijiet ottiċi, partijiet aerospazjali, komponenti ta' inġinerija ta' preċiżjoni, jew applikazzjonijiet ta' semikondutturi, din il-magna tagħti finituri tal-wiċċ stabbli, ripetibbli u ta' kwalità għolja—anke f'tolleranzi fil-livell tan-nanometru.


Kompatibilità Komprensiva tal-Biċċa tax-Xogħol tal-Magna tal-Lustrar Robotika
Is-sistema tappoġġja l-ipproċessar ta':
-
Uċuħ ċattigħal ħġieġ, ċeramika, u pjanċi tal-metall
-
Forom ċilindriċi u koniċibħal rombli, xaftijiet, u tubi
-
Komponenti sferiċi u asferiċigħal sistemi ottiċi
-
Uċuħ ta' forma ħielsa u barra mill-assib'kurvi u tranżizzjonijiet kumplessi
Il-versatilità tagħha tagħmilha adattata għalkemm il-produzzjoni tal-massa kif ukoll il-manifattura tad-dwana ta' preċiżjoni għolja.
Karatteristiċi u Benefiċċji Ewlenin tal-Magna tal-Lustrar Robotika
1. Teknoloġija tar-Ras tal-Lustrar Doppju
-
Mgħammar b'rotazzjoni waħdauawto-rotazzjoniirjus tal-lostru għal flessibilità.
-
Il-kapaċità ta' bidla rapida tal-għodda tappoġġja diversi modi ta' pproċessar mingħajr waqfien twil.
-
Ideali biex taqleb bejn stadji ta' illustrar oħxon u fin.
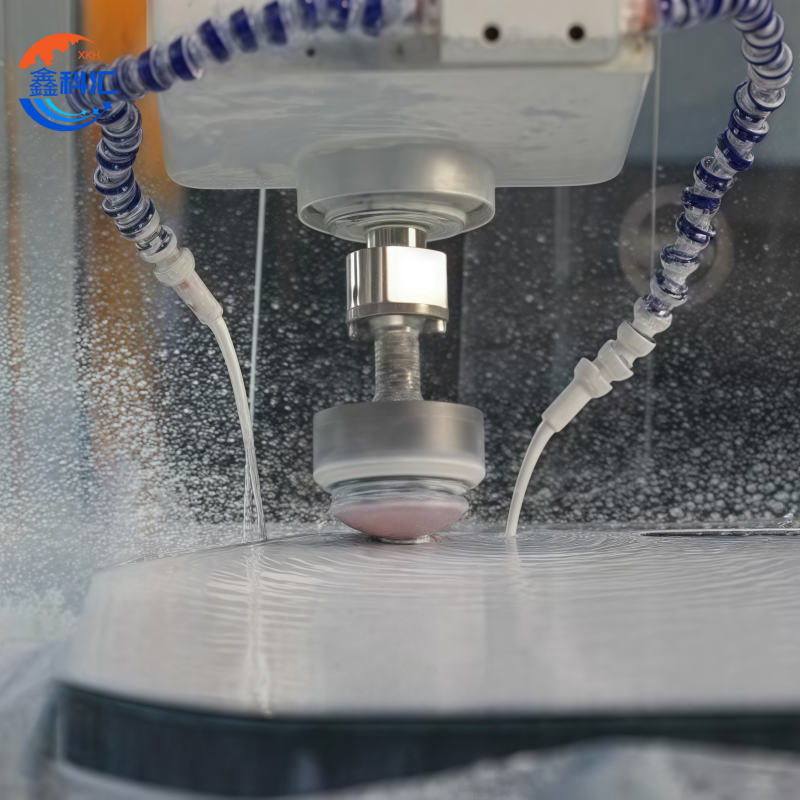
2. Sistema ta' Kontroll tal-Forza ta' Preċiżjoni
-
Monitoraġġ f'ħin reali ta'pressjoni, temperatura, u fluss ta' fluwidu tal-lostru.
-
L-applikazzjoni konsistenti tal-forza tiżgura finitura uniformi tal-wiċċ madwar il-biċċa tax-xogħol.
-
Kapaċi jadatta għall-irregolaritajiet tal-wiċċ awtomatikament.
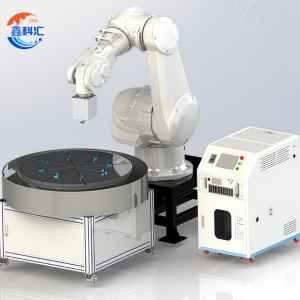
3. Kontroll Robotiku ta' Sitt Assi
-
Libertà sħiħa ta' moviment biex timmaniġġja ġeometriji kumplessi.
-
Mogħdijiet ta' moviment bla xkiel u preċiżi kkalkulati permezz ta' algoritmi avvanzati.
-
Preċiżjoni għolja ta' pożizzjonament ripetut minn ±0.04 mm sa ±0.1 mm skont il-mudell.
4. Awtomazzjoni u Kejl Intelliġenti
-
Għodod ta' kalibrazzjoni awtomatika għal setup u allinjament preċiżi.
-
Sistema ta' kejl tal-koordinati għal pożizzjonament preċiż.
-
Mhux obbligatorjumonitoraġġ tal-ħxuna onlinegħal kontroll tal-kwalità f'ħin reali.
5. Kwalità tal-Bini ta' Grad Industrijali
-
Id-disinn ta' servo-mutur doppju jżid l-effiċjenza u l-istabbiltà tal-lostru.
-
L-istruttura mekkanika riġida timminimizza l-vibrazzjoni u tiżgura durabilità fit-tul.

Speċifikazzjonijiet Tekniċi tal-Magna tal-Lustrar Robotika
| Mudell tat-Tagħmir | Korp tar-Robot | Preċiżjoni tal-Pożizzjonament Irrepeti | Firxa tad-Dijametru tal-Ipproċessar | Ras tal-Lustrar b'Rotazzjoni Unika | Ras tal-Lustrar b'Rotazzjoni Multipla | Għodda Żgħira | Lustrar tat-Tip tar-Rota Prinċipali | Lustrar tar-Ras Sferiku | Tmiem il-Bidla Mgħaġġla | Għodda ta' Kalibrazzjoni Awtomatika | Ras tal-Kejl tal-Koordinati | Monitoraġġ tal-Ħxuna Online | Pjattaforma ta' Kontroll Numeriku |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0.04mm / firxa sħiħa | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0.05mm / firxa sħiħa | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0.05mm / firxa sħiħa | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0.06mm / firxa sħiħa | Φ100 ~ Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1mm / firxa sħiħa | Φ100 ~ Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1mm / firxa sħiħa | Φ200 ~ Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1mm / firxa sħiħa | Φ200 ~ Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Mistoqsijiet Frekwenti – Magna tal-Lustrar tar-Robot
1. Liema tipi ta' biċċiet tax-xogħol tista' timmaniġġja l-magna tal-lostru tar-robot?
Il-magna tal-lostru robotika tagħna tappoġġja diversi forom u uċuħ, inklużi kontorni ċatti, mgħawġa, sferiċi, ta' forma ħielsa, u kumplessi. Hija adattata għal komponenti ottiċi, forom ta' preċiżjoni, uċuħ tal-metall, u applikazzjonijiet oħra ta' lostru ta' preċiżjoni għolja.
2. X'inhi d-differenza bejn ir-ras tal-lostru b'Rotazzjoni Unika u b'Rotazzjoni Multipla?
-
Ras tal-Lustrar b'Rotazzjoni UnikaL-għodda ddur madwar assi wieħed, ideali għal finitura standard tal-wiċċ u tneħħija ta' materjal b'veloċità għolja.
-
Ras tal-Lustrar b'Rotazzjoni MultiplaL-għodda tgħaqqad ir-rotazzjoni mar-rotazzjoni personali (li ddur bl-ajru), u b'hekk tippermetti illustrar aktar uniformi fuq uċuħ mgħawġa u irregolari.
3. X'inhu d-dijametru massimu tal-ipproċessar?
Skont il-mudell:
-
Mudelli kompatti (eż., IRP500S) jimmaniġġjawΦ50–Φ500mm.
-
Mudelli fuq skala kbira (eż., IRP2000AD) jimmaniġġjaw saΦ2000mm.
Dwarna
XKH tispeċjalizza fl-iżvilupp ta' teknoloġija għolja, il-produzzjoni, u l-bejgħ ta' ħġieġ ottiku speċjali u materjali ġodda tal-kristall. Il-prodotti tagħna jservu l-elettronika ottika, l-elettronika għall-konsumatur, u l-militar. Noffru komponenti ottiċi taż-żaffir, kisi tal-lentijiet tat-telefowns ċellulari, Ċeramika, LT, Silicon Carbide SIC, Kwarz, u wejfers tal-kristall semikondutturi. B'kompetenza tas-sengħa u tagħmir avvanzat, neċċellaw fl-ipproċessar ta' prodotti mhux standard, bil-għan li nkunu intrapriża ewlenija ta' teknoloġija għolja fil-materjali optoelettroniċi.

Prodotti Relatati
-

4H-semi HPSI 2inch SiC sottostrat wejfer Prodott...
-
Kaxxa kwadra tat-trasport apposta kaxxa kwadra tieqa p...
-

Wejfer tas-sottostrat SiC HPSI ta' 6 pulzieri tal-Karbur tas-Silikon...
-

Korundum taż-Żaffir għall-Ġebla Prezzjuża Al2O3 kristall ru...
-

Lustrar ta' sottostrat ta' kristall wieħed tal-metall tal-aluminju...
-

Wejfer miksi bl-Awstralja, wejfer taż-żaffir, wejfer tas-silikon...